TODAY: Dimension Reduction¶
- Autoencoder
- Variational autoencoder
- A touch on generative models
Vanilla Autoencoder¶
Autoencoders create general nonlinear embedding of data in a low-dimensional latent space.
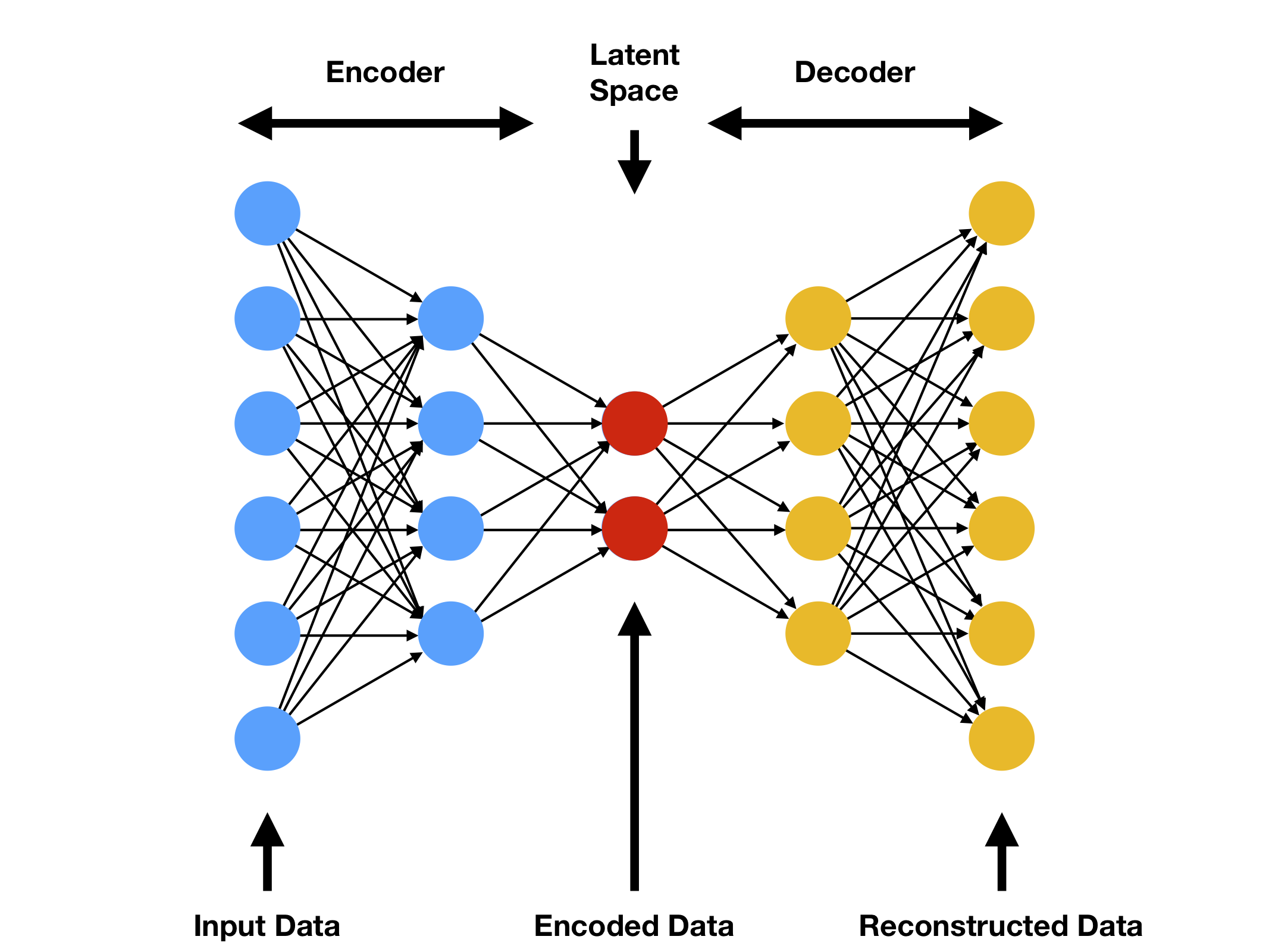
Mathematically, the model is simple
Encoder: $z=f_e(x;\theta_e)$
Decoder: $\hat{x}=f_d(z;\theta_d)$
where $\theta_e$ and $\theta_d$ are learnable parameters, and $\text{dim}(z)\ll\text{dim}(x)$.
The loss can be standard L2 norm $$ \mathcal{L}(x,\hat{x}) = \sum_{i=1}^N\norm{x_i-\hat{x}_i}^2 $$ so we minimize the error in reconstruction.
Example¶
We try the autoencoder on the standard MNIST dataset of hand-written digits.
plot_image(proc_image(train_loader, [0, 1, 2, 3]), sz=(12,4))

# Code inspired from https://github.com/Jackson-Kang/Pytorch-VAE-tutorial
class Encoder_AE(nn.Module):
def __init__(self, input_dim, hidden_dim, latent_dim):
super(Encoder_AE, self).__init__()
self.inp1 = nn.Linear(input_dim, hidden_dim)
self.inp2 = nn.Linear(hidden_dim, hidden_dim)
self.ltnt = nn.Linear(hidden_dim, latent_dim)
self.LeakyReLU = nn.LeakyReLU(0.2)
def forward(self, x):
_h = self.LeakyReLU(self.inp1(x))
_h = self.LeakyReLU(self.inp2(_h))
_h = self.ltnt(_h)
return _h
class Decoder(nn.Module):
def __init__(self, latent_dim, hidden_dim, output_dim):
super(Decoder, self).__init__()
self.hid1 = nn.Linear(latent_dim, hidden_dim)
self.hid2 = nn.Linear(hidden_dim, hidden_dim)
self.output = nn.Linear(hidden_dim, output_dim)
self.LeakyReLU = nn.LeakyReLU(0.2)
def forward(self, x):
_h = self.LeakyReLU(self.hid1(x))
_h = self.LeakyReLU(self.hid2(_h))
x_hat = torch.sigmoid(self.output(_h))
return x_hat
class AE(nn.Module):
def __init__(self, Encoder, Decoder):
super(AE, self).__init__()
self.Encoder = Encoder
self.Decoder = Decoder
def forward(self, x):
z = self.Encoder(x)
x_hat = self.Decoder(z)
return x_hat
def predict(self, x): # For compatibility
return self.forward(x)
enc_ae = Encoder_AE(input_dim=x_dim, hidden_dim=hidden_dim, latent_dim=latent_dim)
dec_ae = Decoder(latent_dim=latent_dim, hidden_dim = hidden_dim, output_dim = x_dim)
mdl_ae = AE(Encoder=enc_ae, Decoder=dec_ae).to(DEVICE)
_loss = nn.MSELoss(reduction='sum')
def loss_AE(x, mdl):
return _loss(mdl(x), x)
train_model(mdl_ae, loss_AE)
Epoch 1: 30.194967837835193 Epoch 2: 10.067500433054114 Epoch 3: 6.9388193385867725 Epoch 4: 5.7170717874313635 Epoch 5: 4.980709319202251 Epoch 6: 4.475009423257513 Epoch 7: 4.078945089859238 Epoch 8: 3.789954772337848 Epoch 9: 3.5555493169157253 Epoch 10: 3.358758305468424 Epoch 11: 3.2103049215530115 Epoch 12: 3.069630401815118 Epoch 13: 2.943403834882682 Epoch 14: 2.8330578771218633 Epoch 15: 2.74341720326317 Epoch 16: 2.6617127162825085 Epoch 17: 2.5766300531301356 Epoch 18: 2.5111068582932816 Epoch 19: 2.4387502534640255 Epoch 20: 2.385131589351393 Epoch 21: 2.3336342617028545 Epoch 22: 2.278604788804094 Epoch 23: 2.229951473739191 Epoch 24: 2.1871575828386667 Epoch 25: 2.155386094744496 Epoch 26: 2.102653617030989 Epoch 27: 2.0758359095807464 Epoch 28: 2.040510418721551 Epoch 29: 2.0098357458862917 Epoch 30: 1.9761375763499875
xtrue, xpred = eval_model(mdl_ae) # Now we try the autoencoder on new data
idx = [0, 10, 20, 42]
plot_image(proc_image(xtrue[0], idx), sz=(8,4))
plot_image(proc_image(xpred[0], idx), sz=(8,4))


# Can we generate NEW images by interpolation in the latent space?
with torch.no_grad():
n0, n1 = torch.randn(2, latent_dim)
w = torch.linspace(0, 1, batch_size).reshape(-1,1)
inp = (w*n0 + (1-w)*n1).to(DEVICE)
generated_images = dec_ae(inp)
xs = proc_image(generated_images, [0, 19, 39, 59, 79, 99])
plot_image(xs, sz=(12,4))
# Unfortunately, no...

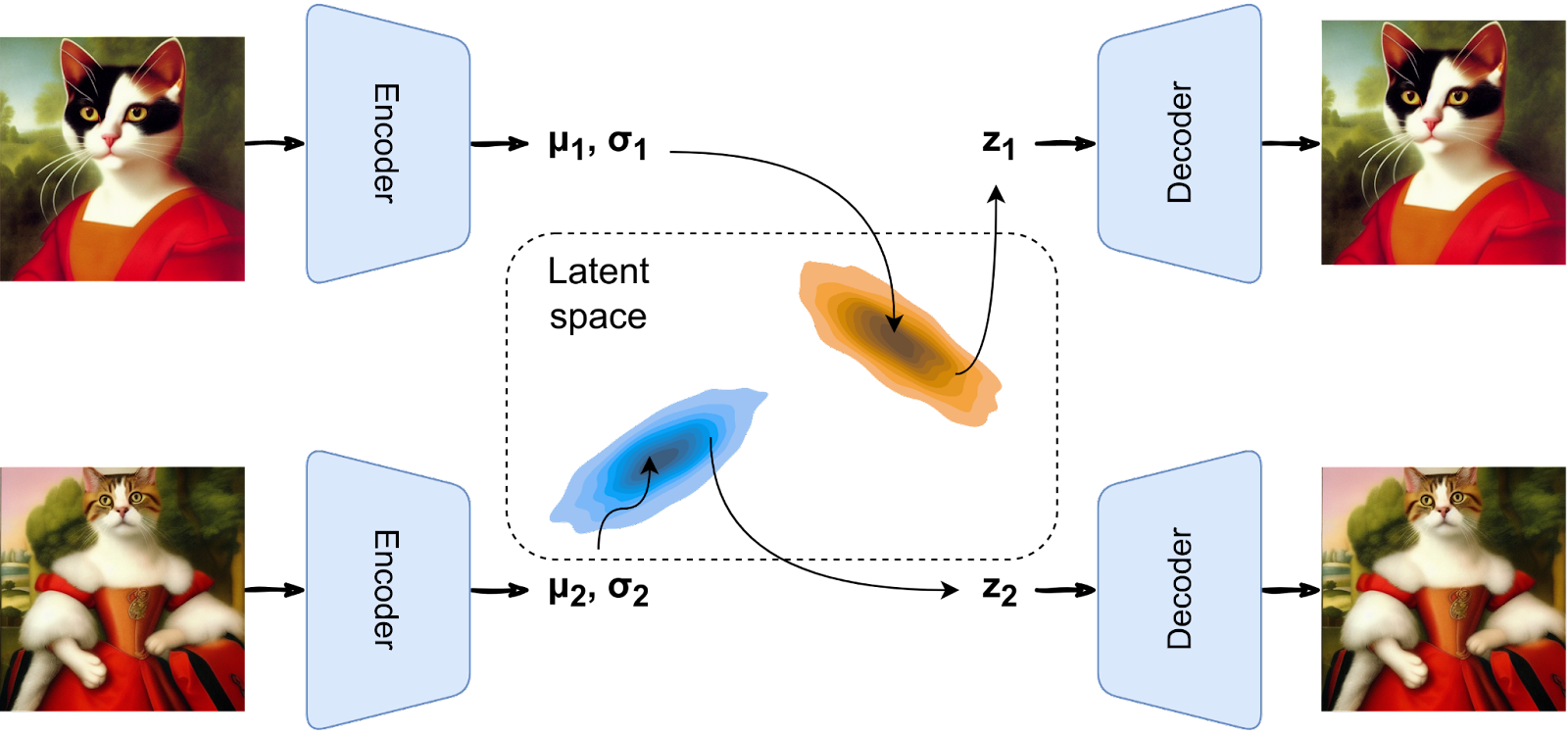
Variational AutoEncoder (VAE)¶
This is an initial step to the Generative Models.
Core idea: Enforce smoothness in latent space
- New encoder: $z\sim\mathcal{N}(\mu(x),\sigma^2(x))$
- Decoder remains the same: But its input $z$ is random
Let's use probability theory to characterize the model.
Data distribution, given by dataset: $\tilde{p}(x)$
Latent distribution, assumed: $q(z)=\mathcal{N}(0,I)$
Encoder, learned: $p(z|x)=\mathcal{N}(\mu(x),\sigma^2(x))$
Decoder, learned: $q(x|z)$
- Data + Encoder give $$ p(z|x)\tilde{p}(x) = p(x,z) $$
- Latent + Decoder give $$ q(x|z)q(z) = q(x,z) $$
- The joint distribution of $x$ and $z$ should be the same $$ p(x,z) = q(x,z) $$
Use Kullback–Leibler divergence to characterize the difference. $$ KL(p||q) = \int p(x,z)\log\left(\frac{p(x,z)}{q(x,z)}\right)dxdz $$
After lengthy math $$ KL(p||q) \propto \underbrace{-\int \tilde{p}(x) \color{blue}{\log q(x|z)} dx}_{\text{Reconstruction}} + \underbrace{\int \tilde{p}(x) \color{red}{KL(p(z|x)||q(z))} dx}_{\text{Regularization}} $$
- If $q(x|z)$ is Gaussian, Reconstruction loss $\propto \norm{\hat{x}-\mu(z)}^2$; hence the name.
- Regularization enforces the encoded distribution $p(z|x)$ to be unit Gaussian.
Back to Example¶
class Encoder_VAE(nn.Module):
def __init__(self, input_dim, hidden_dim, latent_dim):
super(Encoder_VAE, self).__init__()
self.inp1 = nn.Linear(input_dim, hidden_dim)
self.inp2 = nn.Linear(hidden_dim, hidden_dim)
self.mean = nn.Linear(hidden_dim, latent_dim)
self.var = nn.Linear(hidden_dim, latent_dim) # New
self.LeakyReLU = nn.LeakyReLU(0.2)
def forward(self, x):
h_ = self.LeakyReLU(self.inp1(x))
h_ = self.LeakyReLU(self.inp2(h_))
mean = self.mean(h_)
log_var = self.var(h_) # New, note that we learn log(sigma^2)
return mean, log_var # to ensure positivity of sigma^2
# class Decoder
# remains the same
class VAE(nn.Module):
def __init__(self, Encoder, Decoder):
super(VAE, self).__init__()
self.Encoder = Encoder
self.Decoder = Decoder
def reparameterization(self, mean, var):
# New, enables backpropagation through random samples
epsilon = torch.randn_like(var).to(DEVICE)
z = mean + var*epsilon
return z
def forward(self, x):
mean, log_var = self.Encoder(x)
z = self.reparameterization(mean, torch.exp(0.5 * log_var))
x_hat = self.Decoder(z)
return x_hat, mean, log_var # Note the new outputs
def predict(self, x):
return self.forward(x)[0]
enc_va = Encoder_VAE(input_dim=x_dim, hidden_dim=hidden_dim, latent_dim=latent_dim)
dec_va = Decoder(latent_dim=latent_dim, hidden_dim = hidden_dim, output_dim = x_dim)
mdl_va = VAE(Encoder=enc_va, Decoder=dec_va).to(DEVICE)
_loss = nn.BCELoss(reduction='sum') # Using a binary-cross-entropy loss instead
def loss_VAE(x, mdl):
x_hat, mean, log_var = mdl(x)
REC = _loss(x_hat, x)
KLD = - 0.5 * torch.sum(1+ log_var - mean.pow(2) - log_var.exp())
return REC + KLD
train_model(mdl_va, loss_VAE)
Epoch 1: 173.52214802991966 Epoch 2: 129.110544967524 Epoch 3: 116.70865482183848 Epoch 4: 112.81034709541944 Epoch 5: 110.62437705420493 Epoch 6: 108.77609867357053 Epoch 7: 107.55575478988418 Epoch 8: 106.47694948938334 Epoch 9: 105.64202525041736 Epoch 10: 105.02165815095472 Epoch 11: 104.44441283975897 Epoch 12: 103.90396427313752 Epoch 13: 103.48758464628547 Epoch 14: 103.14027183978506 Epoch 15: 102.78024919462125 Epoch 16: 102.5086123193604 Epoch 17: 102.28497179544031 Epoch 18: 102.02403370852463 Epoch 19: 101.7639648600532 Epoch 20: 101.63118320573352 Epoch 21: 101.5072508705916 Epoch 22: 101.29524319503861 Epoch 23: 101.13557287862584 Epoch 24: 101.01100639738105 Epoch 25: 100.8401448214472 Epoch 26: 100.79163619052588 Epoch 27: 100.66462023294032 Epoch 28: 100.49105137794763 Epoch 29: 100.42876656406511 Epoch 30: 100.32168006247392
xtrue, xpred = eval_model(mdl_va) # Now we try the autoencoder on new data
idx = [0, 10, 20, 42]
plot_image(proc_image(xtrue[0], idx), sz=(8,4))
plot_image(proc_image(xpred[0], idx), sz=(8,4))

# Try to interpolate again
with torch.no_grad():
n0, n1 = torch.randn(2, latent_dim)
w = torch.linspace(0, 1, batch_size).reshape(-1,1)
inp = (w*n0 + (1-w)*n1).to(DEVICE)
generated_images = dec_va(inp)
xs = proc_image(generated_images, [0, 19, 39, 59, 79, 99])
plot_image(xs, sz=(12,4)) # We did it!

Generative Models¶
The decoder portion of VAE is a generative model $$ q(x|z) $$
- Randomly pick a sample from $p(z)=\mathcal{N}(0,I)$.
- Generate a new $x$ that looks like data $\tilde{p}(x)$.
There are much more architectures
- Generative Adversarial Networks (GANs)
- Autoregressive Models, e.g., PixelRNN, PixelCNN, GPT
- Normalizing Flows
- Diffusion Models
- etc.
We will cover 1-2 of these later.
One more example¶
"DeepSDF" model - it directly uses the latent vector to describe a 3D object.
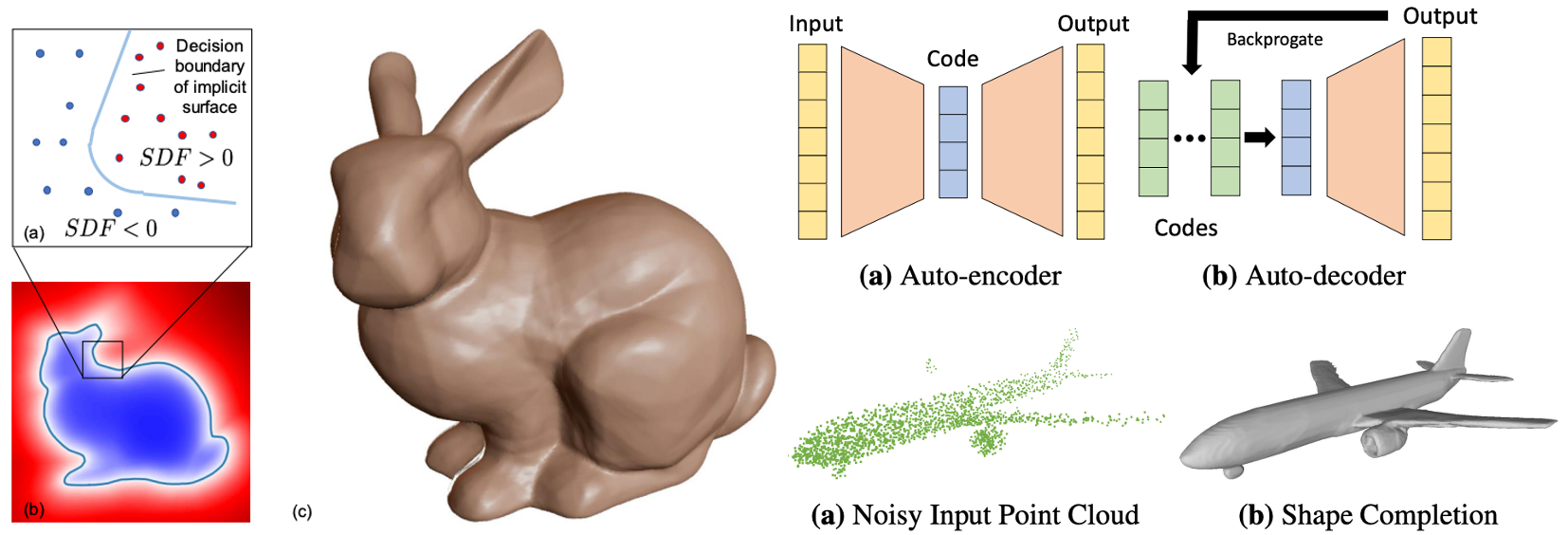
Ref: J. Park, et al., DeepSDF: Learning Continuous Signed Distance Functions for Shape Representation, 2019