Feature Engineering¶
So far...¶
The regression models we have seen so far require the determination and selection of features, e.g.
- Linear regression: $f(x) = \phi(x)^Tw$
- Possible to "handcraft" as many features as possible
- And introduce regularization to "pick" features
- Kernel regression: $f(x) = \kappa(x,x')^Ta$
- Features are implicitly defined in the kernels
- Non-parametric: heavy model
- Gaussian process regression: $f(x) = m(x) + z(x,x')$
- Matching all data samples by "brutal force"
- Non-parametric: heavy model (again)
Necessity for "clever" features¶
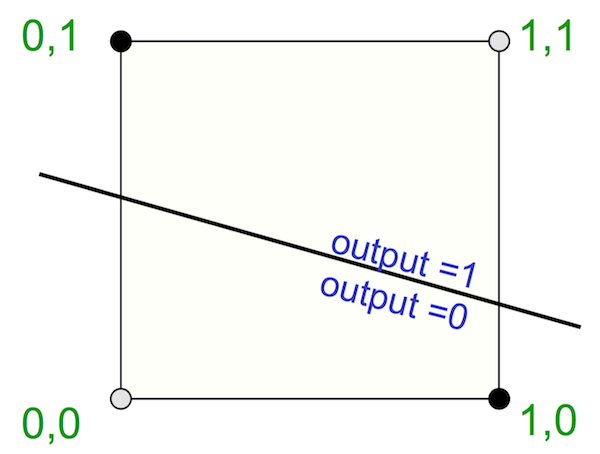
Canonical example: XOR function
- The positive/negative examples are not linearly separable.
- Need to map the input ($x_1,x_2$) to a feature space where examples are linearly separable.
 (Figure from Raquel Urtasun & Rich Zemel)
(Figure from Raquel Urtasun & Rich Zemel)
Possible choice: $\phi(x_1, x_2) = \cos(\pi(x_1+x_2))$
so that $\phi(0,0)=\phi(1,1)=1$ and $\phi(0,1)=\phi(1,0)=-1$
One more example from Aeroacoustics¶
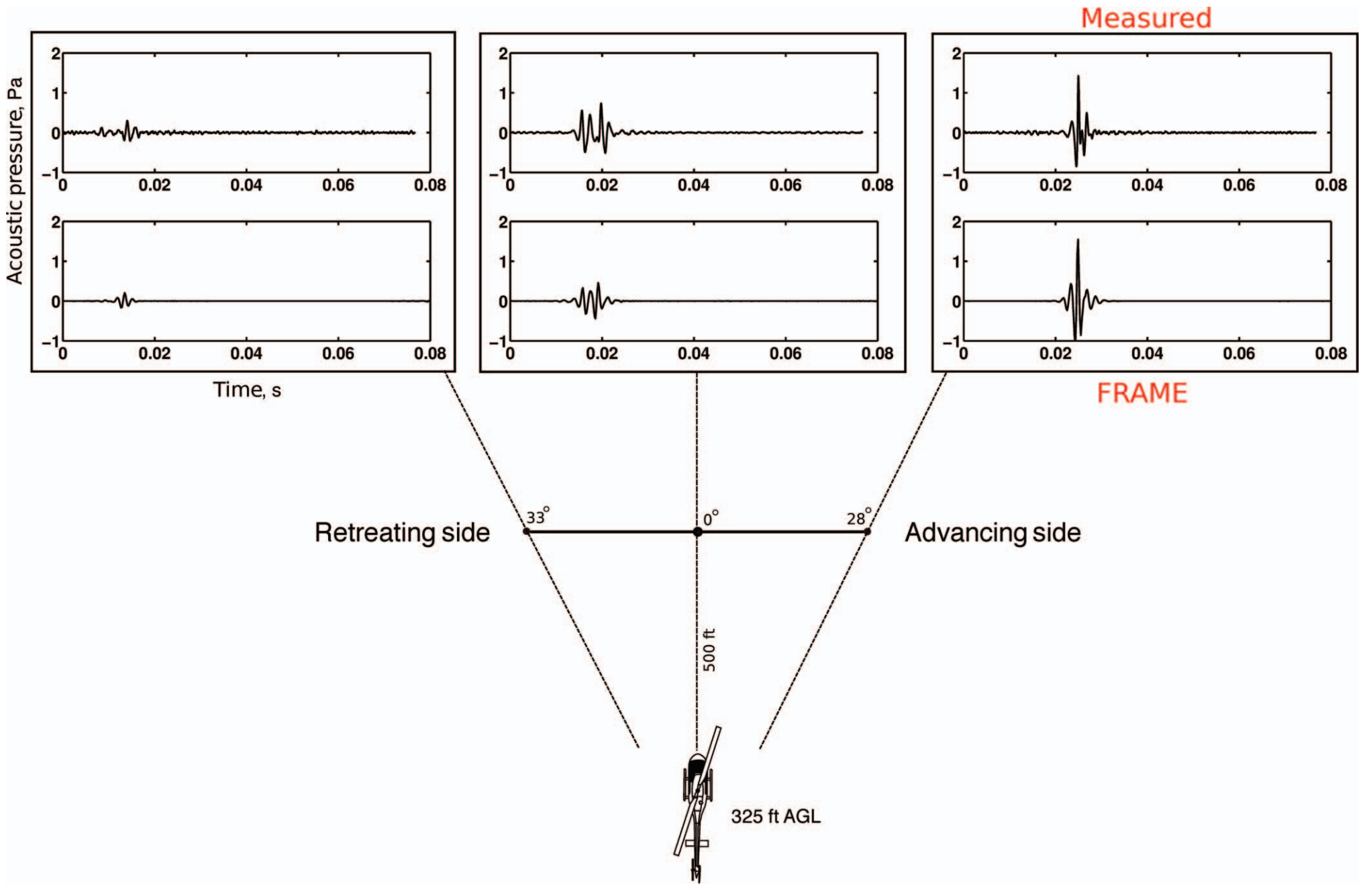 (E. Greenwood, et al. JAHS 60, 022007 (2015))
(E. Greenwood, et al. JAHS 60, 022007 (2015))
One more example from Aeroacoustics¶
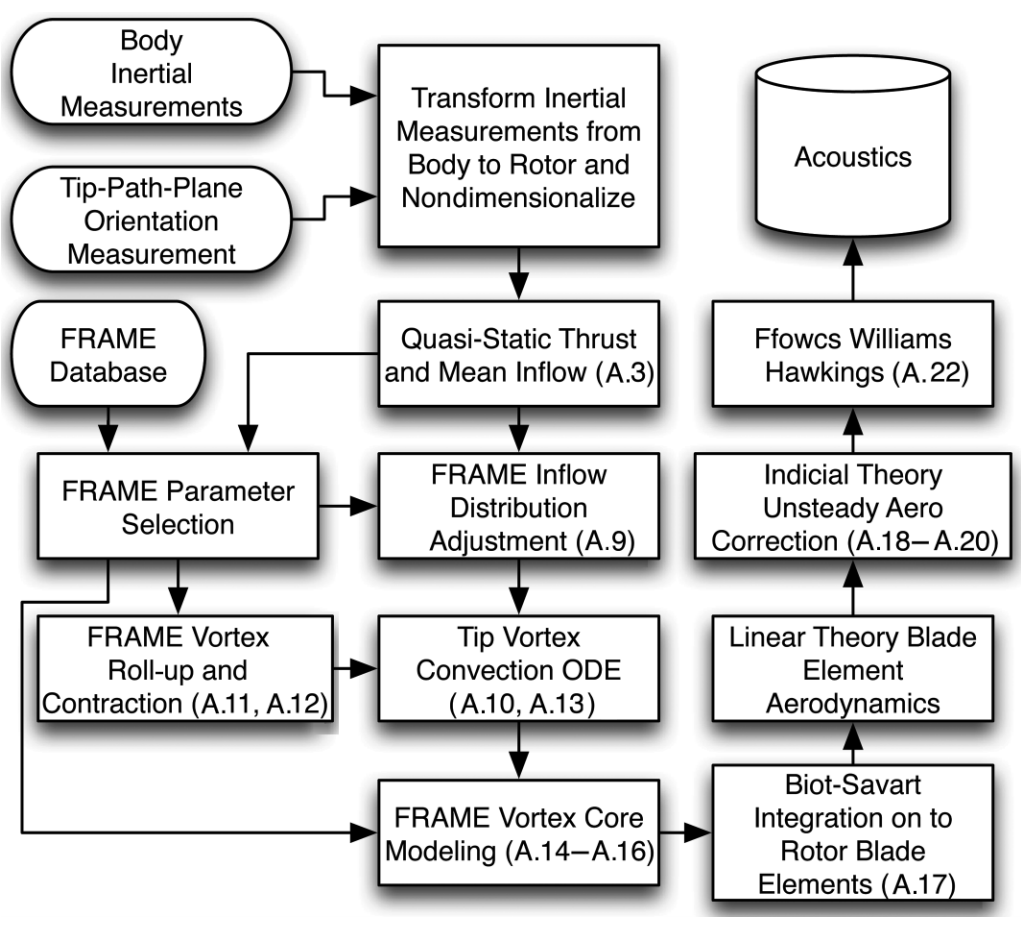 (E. Greenwood, et al. JAHS 60, 022007 (2015))
(E. Greenwood, et al. JAHS 60, 022007 (2015))
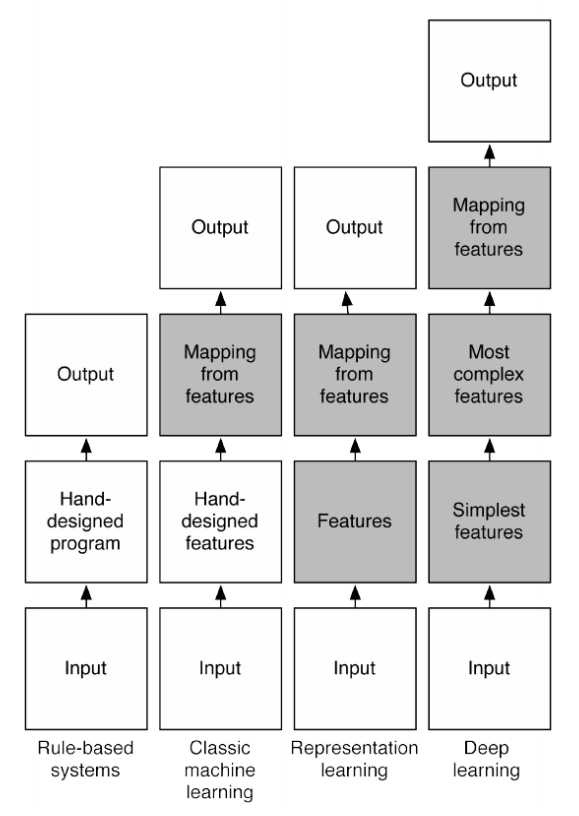
Drawbacks of handcrafting features¶
- Requires expert knowledge
- Requires time-consuming hand-tuning
This is why people are interested in neural networks, which can somehow figure out features from raw data.
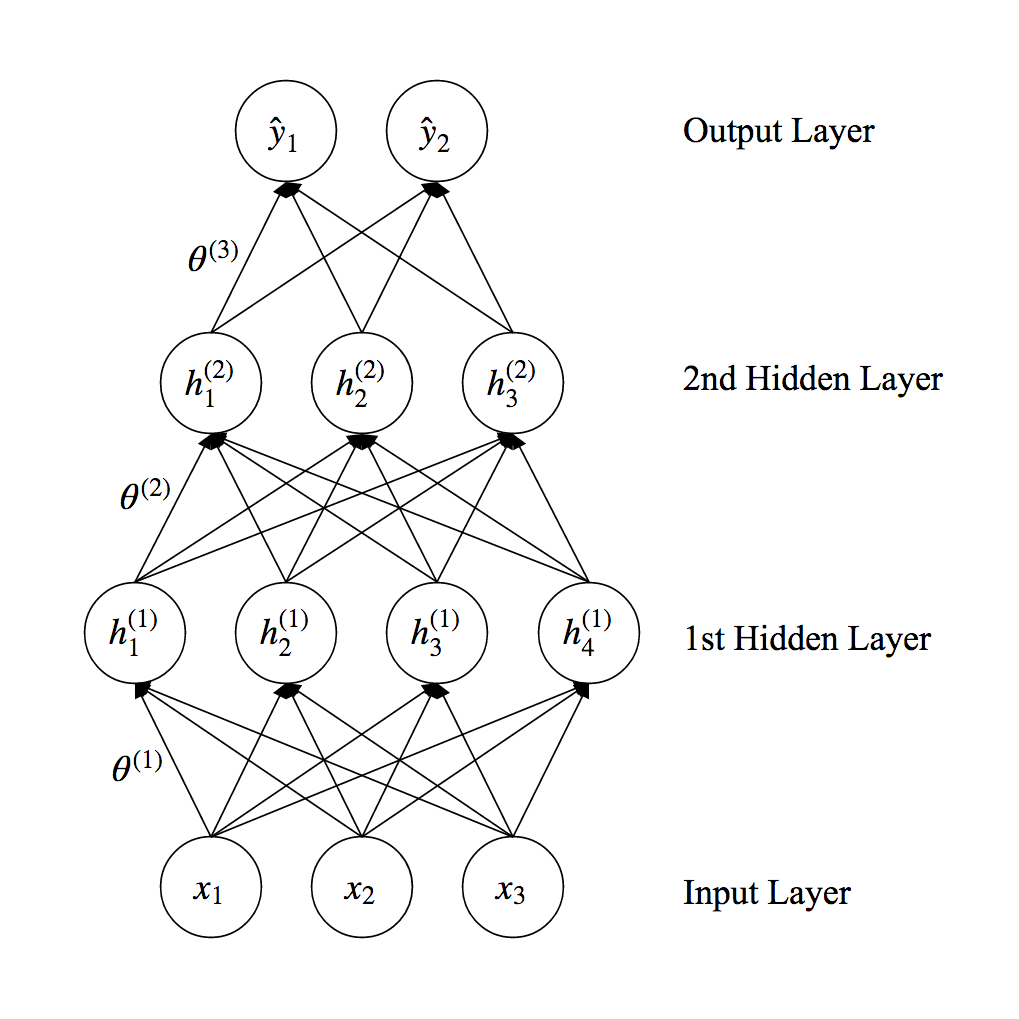
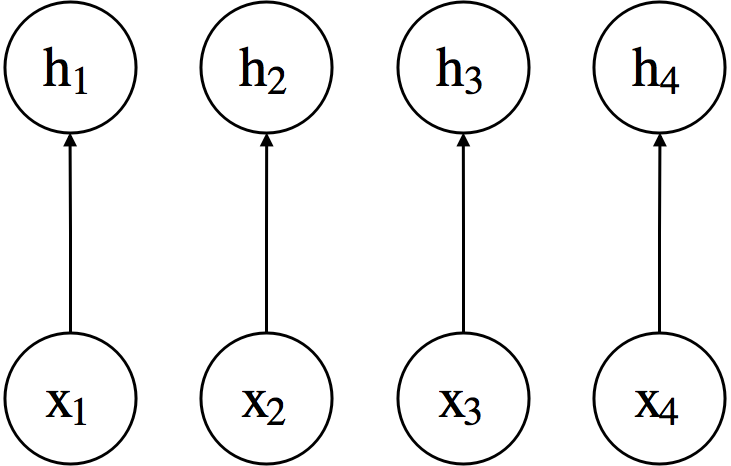
Overview of Neural Networks¶
- Input Layer: provides input
- Hidden Layers: features extracted from input - there can be many
- Output Layer: output of the network
- Parameters (or weights) for each layer, $\theta^{(i)}$
Overview of Neural Networks¶
- A loss function is defined over the output units and desired outputs (i.e., labels) $$ \mathcal{L}\left( \textbf{y}, \hat{\textbf{y}}; \theta \right) \mbox{ where } \hat{\textbf{y}}=f(\textbf{x};\theta) $$
- The parameter of the network is trained to minimize the loss function based on gradient descent methods $$ \min_{\theta} \left[ \mathcal{L}\left( \textbf{y}, \hat{\textbf{y}}; \theta \right) \right] $$
- Forward Propagation (inference): Compute $\hat{\textbf{y}}=f(\textbf{x};\theta)$ (output given input)
- Backward Propagation (learning): Compute $\nabla_{\theta}\mathcal{L}$ (gradient of loss w.r.t. parameters)
Focus of Today: Forward Propagation¶
Forward Propagation¶
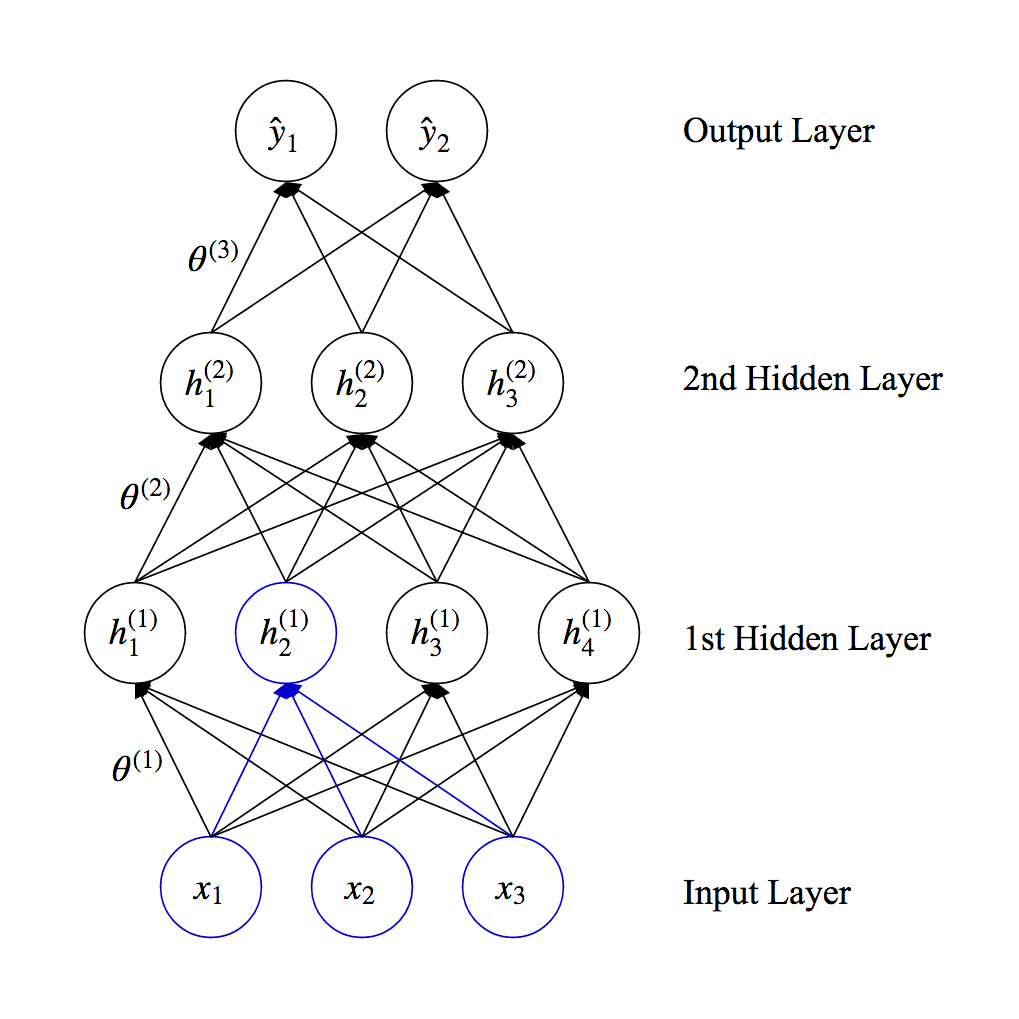
Forward Propagation¶
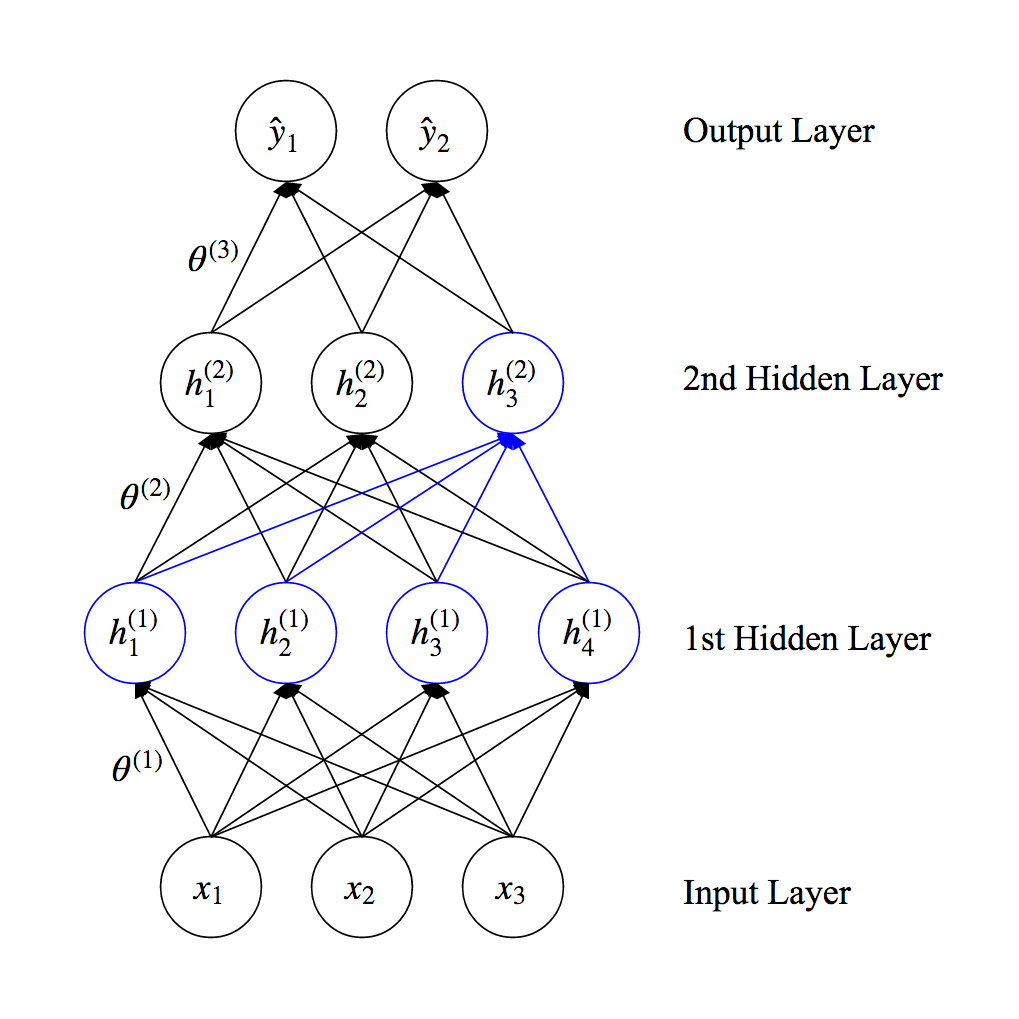
Forward Propagation¶
- The activation of each unit is computed based on the previous layer and parameters (or weights) associated with edges $$\underbrace{\textbf{h}^{(l)}}_{l\mbox{-th layer}}=f^{(l)}(\underbrace{\textbf{h}^{(l-1)}}_{(l-1)\mbox{-th layer}}; \underbrace{\theta^{(l)}}_{\mbox{weights}}) \mbox { where } \textbf{h}^{(0)} \equiv \textbf{x}, \textbf{h}^{(L)} \equiv \hat{\textbf{y}}$$ $$\hat{\textbf{y}}=f(\textbf{x};\theta)=f^{(L)} \circ f^{(L-1)} \cdots f^{(2)} \circ f^{(1)}\left(\textbf{x} ; \theta^{(1)} \right) $$
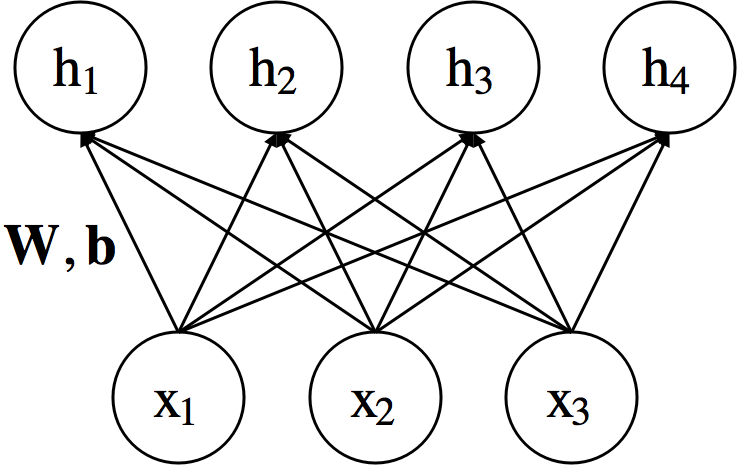
Types of Layers: Linear¶
$$ h_i=\sum_{j}w_{ij}x_j + b_i$$ $$ \textbf{h} = \textbf{W}\textbf{x} + \textbf{b} $$
- $\textbf{x} \in \mathbb{R}^m $ : Input, $\textbf{h} \in \mathbb{R}^n $ : Output
- $\textbf{W} \in \mathbb{R}^{n \times m}$ : Weight, $\textbf{b} \in \mathbb{R}^{n}$ : Bias $\rightarrow$ parameter
- Often called "fully-connected layer"
Types of Layers: Non-linear Activation Function¶
- Applies a non-linear function to individual units.
- There is no weight.
- Allows neural networks to learn non-linear features.
- ex) Sigmoid, Hyperbolic Tangent, Rectified Linear Function
Non-linear Activation: Sigmoid¶
$$ h_i=\sigma (x_i) = \frac{1}{1+\exp\left(-x_i\right)} $$ $$ \textbf{h} = \sigma \left(\textbf{x} \right) $$
xx = np.linspace(-5, 5, 100)
_=plt.plot(xx, 1/(1 + np.exp(-1 * xx)), '-g')

Non-linear Activation: Hyperbolic Tangent (Tanh)¶
$$ h_i= \mbox{tanh}(x_i)=\frac{\exp(x_i)-\exp(-x_i)}{\exp(x_i)+\exp(-x_i)} $$ $$ \textbf{h} = \mbox{tanh} \left(\textbf{x} \right) $$
xx = np.linspace(-5, 5, 100)
_=plt.plot(xx, (np.exp(xx) - np.exp(-1 * xx))/(np.exp(xx) + np.exp(-1 * xx)), '-g')

Non-linear Activation: Rectified Linear (ReLU)¶
$$ h_i= \mbox{ReLU}(x_i)=\max\left(x_i, 0 \right) $$ $$ \textbf{h} = \mbox{ReLU} \left(\textbf{x} \right) $$
Easier to optimize
xx = np.linspace(-5, 5, 101)
_=plt.plot(xx, xx * (xx > 0).astype(np.int), '-g')

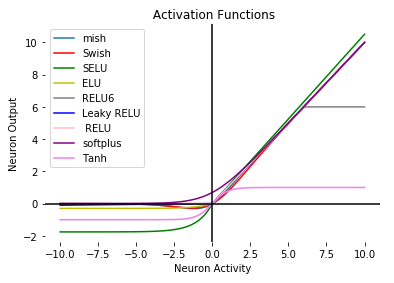
The ReLU family¶
- Smoother for gradient computation at $x=0$
- Adding contribution from the negative end
- Balance for computational cost
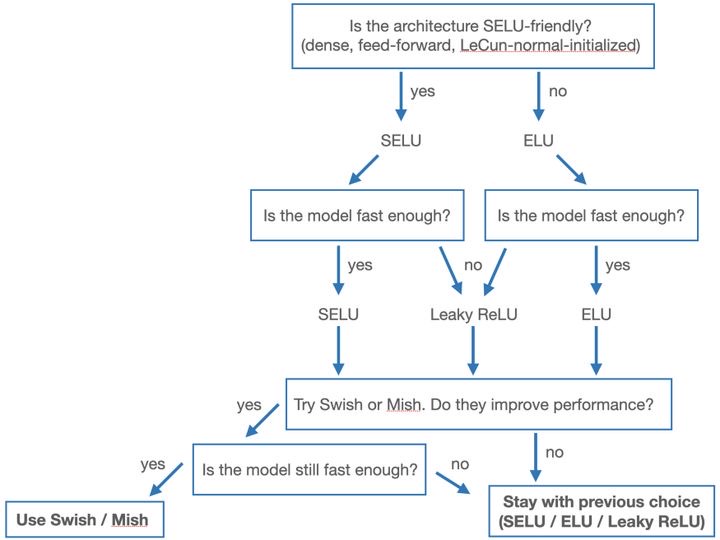
Flow chart for selecting ReLU-type activations¶
Parametric Rectified Linear (PReLU)¶
But I often just use PReLU - simple and avoids dead zones
$$ h_i= \mbox{PReLU}(x_i)=\max\left(x_i, \gamma x_i \right) $$
where $\gamma$ is learnable.
There are certainly more activation functions...¶
For example
- $\exp(-x^2)$ makes the NN similar to GPR's, and belongs to the "Radial Basis Function NN" (RBFNN)
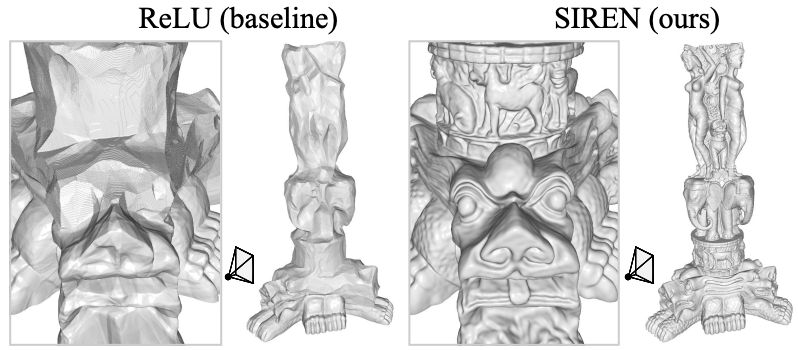
- $\sin(x)$ can work amazingly well in the reconstruction of complex signals (and their derivatives) [1]; example below
[1] Sitzmann, Vincent, et al. Implicit neural representations with periodic activation functions. Arxiv 2006.09661
Types of Layers: Softmax¶
$$ h_i = \frac{\exp(x_i)}{\sum_{j}\exp(x_j)} $$ $$ \textbf{h} = \mbox{Softmax}(\textbf{x}) $$
Special about softmax: it converts any data array into a probability mass distribution.
Because for any $\mathbf{x}$,
- $h_i \geq 0$
- $\sum_{i}h_i=1$
Often used in the last layer in classification tasks.
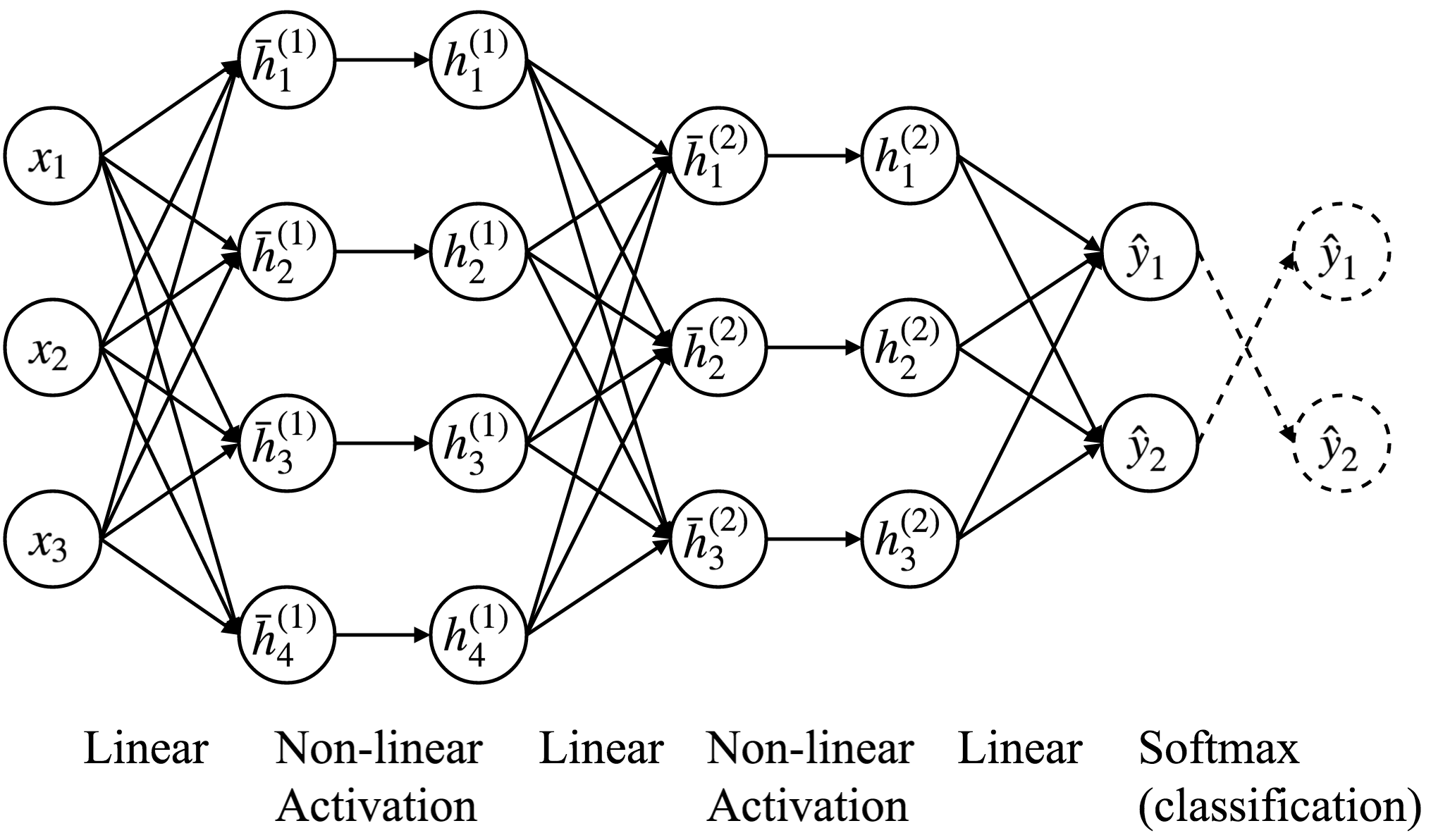
Multi-layer Neural Network¶
- Consists of multiple (linear + non-linear activation) layers.
- Each layer learns non-linear features from its previous layer.
- Often called Multi-Layer Perceptron (MLP).
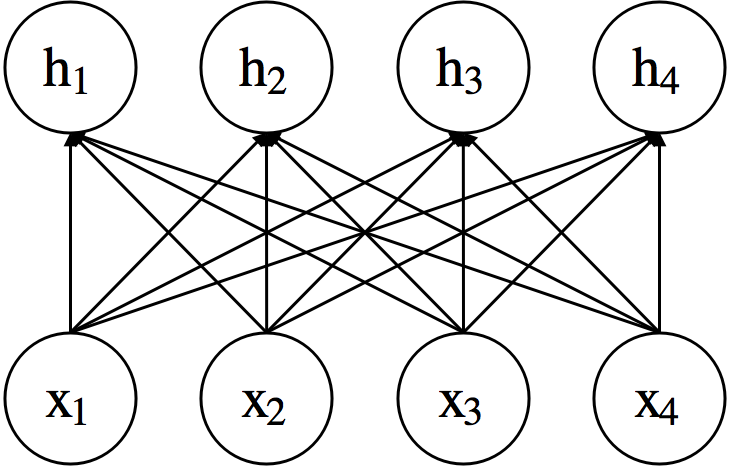
Multi-layer Neural Network¶
- Simplified illustration that only shows edges with weights.
- We assume that each layer is followed by a non-linear activation function (except for the output layer).
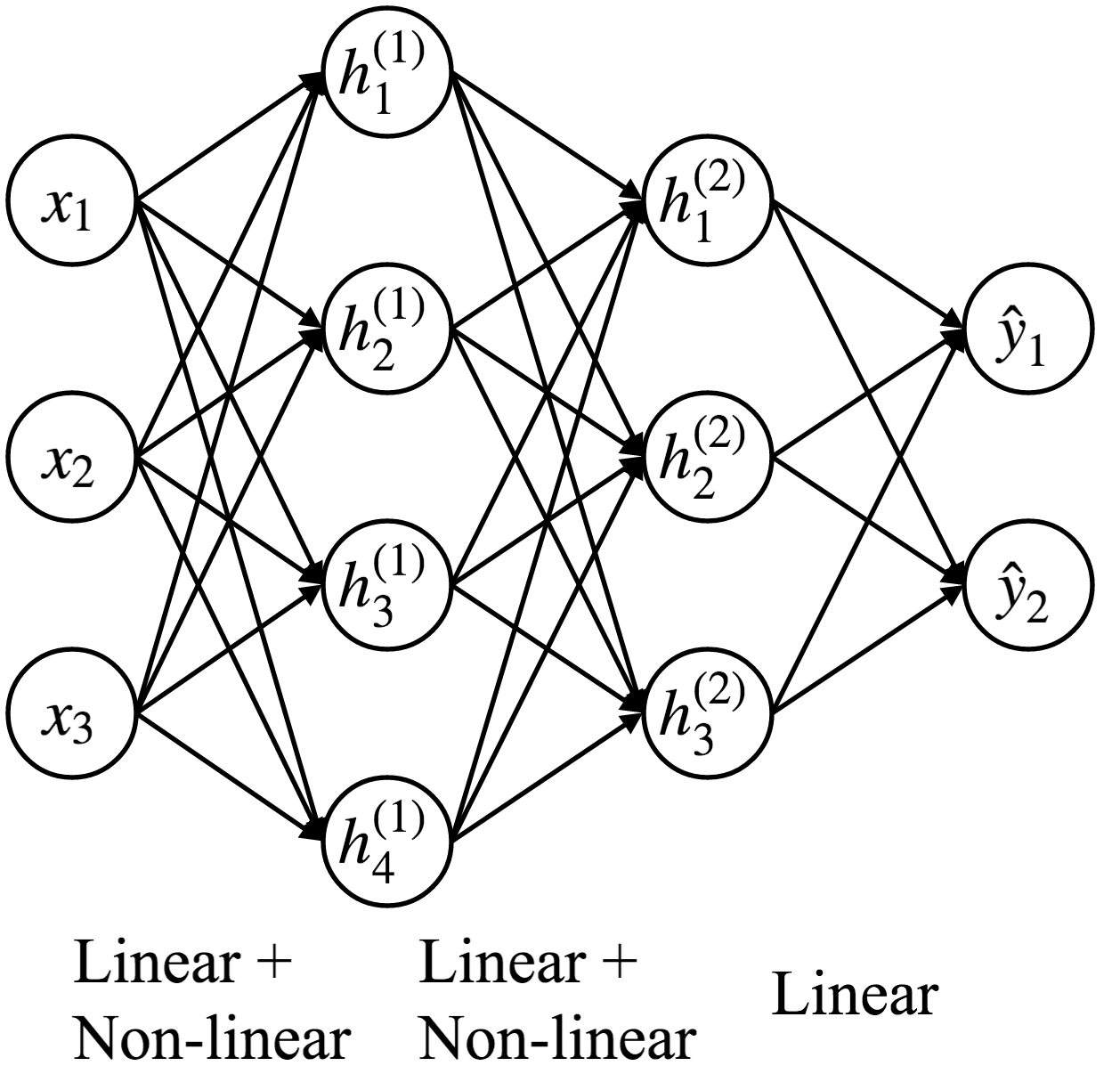
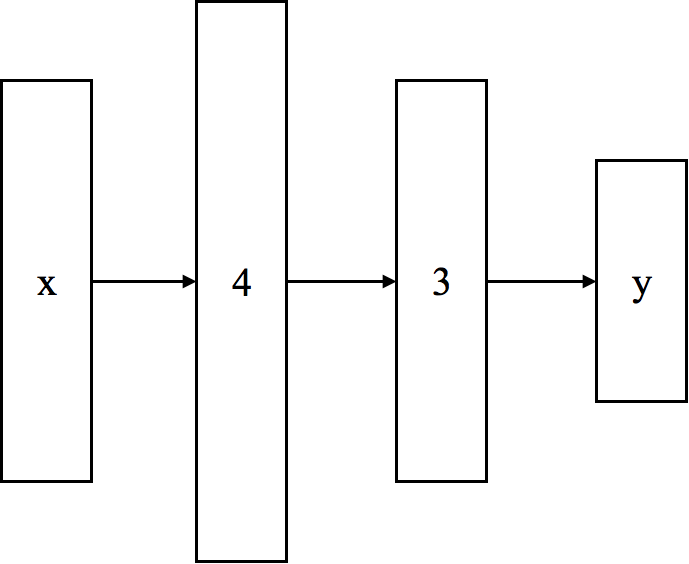
Multi-layer Neural Network¶
- More simplified illustration
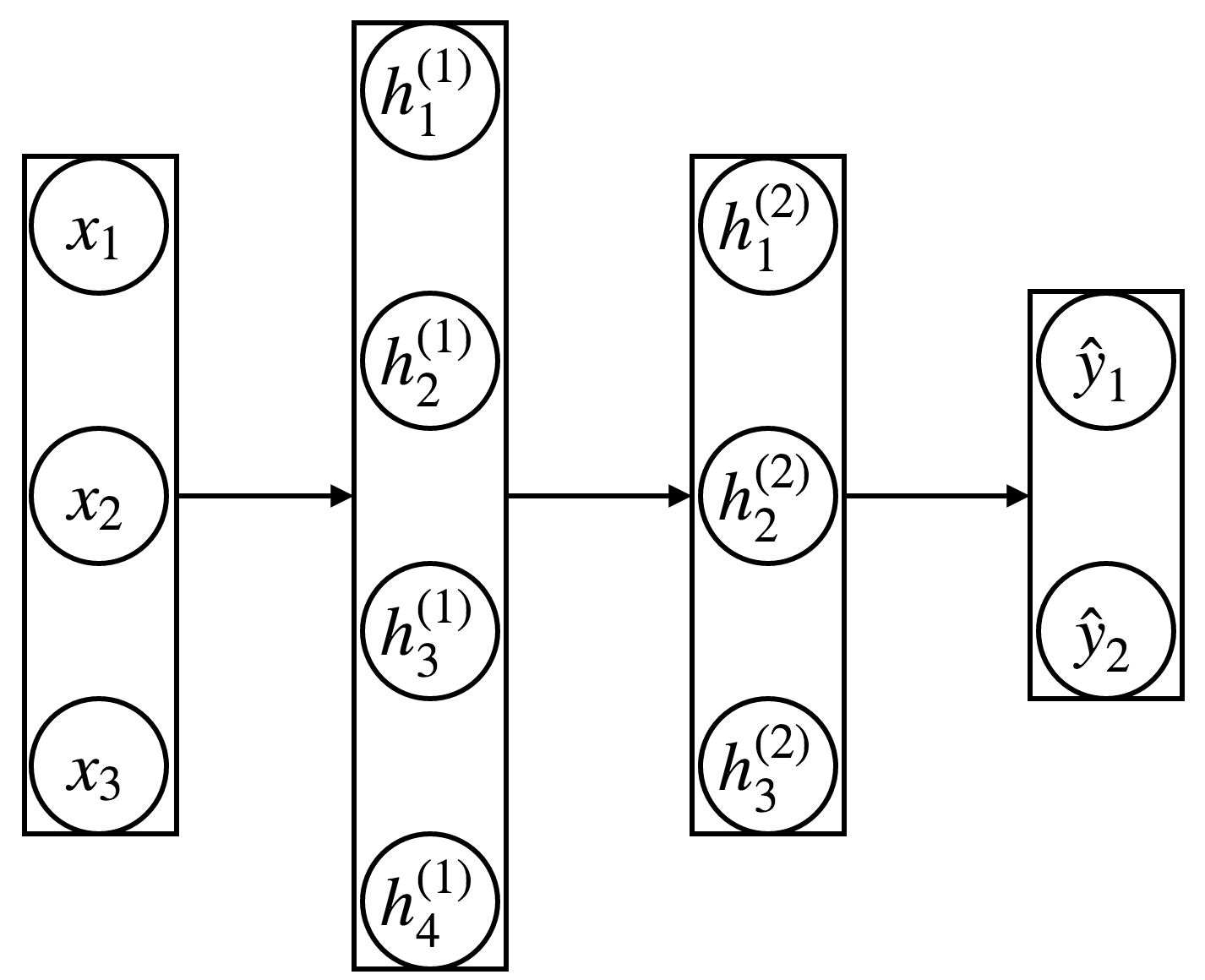
Multi-layer Neural Network¶
- Even more simplified illustration
MLP as universal functional approximation¶
2-layer MLP with infinite number of hidden units can approximate any functions.
- Classical result for shallow NN: to approximate a $C^n$-function (i.e. continuous up to $n$-th order derivative) on a $d$-dimensional set with infinitesimal error $\epsilon$ one needs a network of size about $O(\epsilon^{-d/n})$, assuming a smooth activation function [1]
[1] A. Pinkus, Approximation theory of the MLP model in neural networks, Acta numerica, 8(1999), 143-195.
- Deep NN - still under active research
- For ReLU-based NN, it is equivalent to the finite element method
- The $d$-dimensional $C^1$ functions can be represented with at most $\log_2(d + 1)$ hidden layers with size $O(\epsilon^{-d})$ (i.e. $n=1$). [2]
- If the NN depth does not depend on $\epsilon$, the size $O(\mathrm{poly}(1/\epsilon))$; if the NN depth is $O(1/\epsilon)$, the size $(\mathrm{polylog}(1/\epsilon))$. [3]
[2] ReLU deep neural networks and linear finite elements arXiv:1807.03973
[3] Why Deep Neural Networks for Function Approximation? arXiv:1610.04161
Manual example: Piecewise linear curve fitting¶
Another (easier) exercise would be using sigmoid activation functions to do the XOR problem.
plt.plot(xx, yy, 'rs-', label='Target Function')
_=plt.legend()

- Linear+ReLU:
$h(x;k,b) = ReLU(kx+b)$
- Divide and conquer
Neuron 1: $$h_1=ReLU(x)$$
Neuron 2: $$h_2=ReLU(x-2)$$
Combine to represent the first segment: $$h = -h_1+h_2+1$$
We just need (at most) 8 neurons!
plt.plot(xx, yy, 'rs-', label='Target Function')
plt.plot(xx, y2, 'bo-', label='Step 1')
plt.plot(xx, yy-y2, 'g^--', label='Residual')
_=plt.legend()
