Motivation¶
All models are wrong, but some are useful.
- In traditional CAE analysis, the physics cannot be precisely captured
- e.g. turbulence closure, constitutive relation modeling
- Uncertainty in prediction/design $\rightarrow$ Large safety factor and performance penalty
- In control and system engineering,
- Non-trivial to design a "clever" and robust controller for the complex and stochastic environment
A machine learning model can be mebedded into the traditional analysis framework, so as to enhance the predictive capability of the latter.
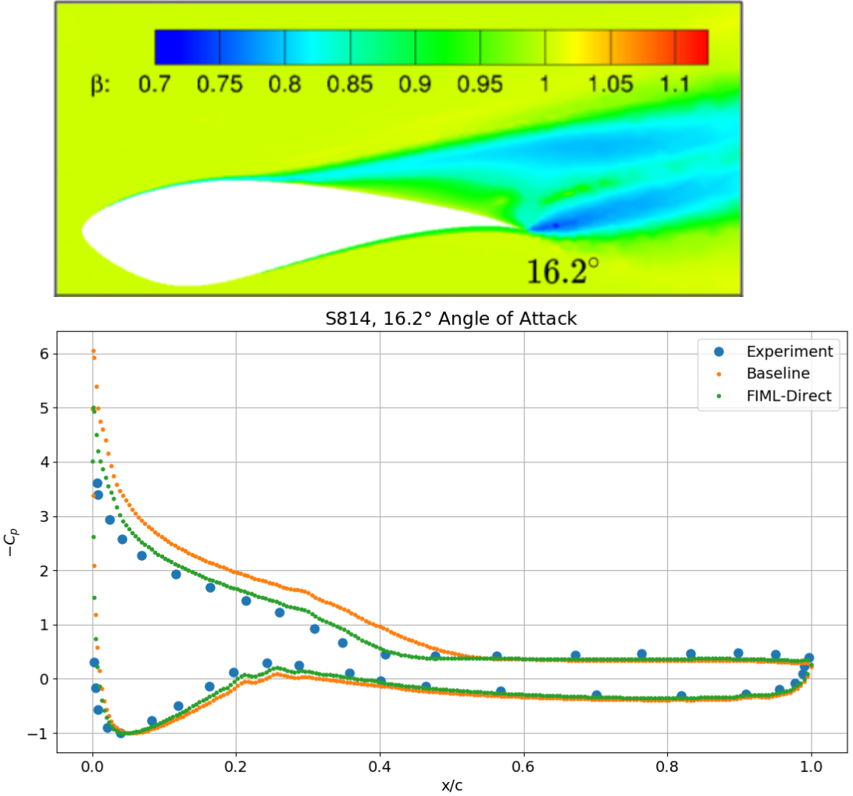 (Figure from Holland, Baeder etc. 2019)
(Figure from Holland, Baeder etc. 2019)
Formulation¶
Notations¶
- $\cR(\vu)=0$ represents the governing equation of the problem, and the $\vu$ is state variable. For example,
- Fluid dynamics: $\cR$ - Navier-Stokes equation, $\vu$ - density, momentum, energy
- Solid mechanics: $\cR$ - Force equilibrium, $\vu$ - structural displacement
- System dynamics: $\cR$ - Rigid body motion, $\vu$ - linear & angular displacement/velocity
- $\cJ(\vu)$ is the model error, i.e. the difference between the theoretical model and the reality. For example,
- Fluid dynamics: Surface pressure of an airfoil is extracted from the fluid solution $\vu$ and compared to experimental measurement. The difference can be used as $\cJ$.
- Solid mechanics: Beam deformation - simulation vs. experiment.
- System dynamics: Dynamical response - simulation vs. experiment.
Calibration model¶
- $\vf=\cM(\vu;\vd)$ represents a machine learning model that is parameterized by $\vf$ and takes in the state variable $\vu$. It returns a set of coefficients $\vd$ to calibrate/correct the model prediction. For example,
- Fluid dynamics: $\vf$ to correct turbulence production term in the RANS equation, so as to improve the pressure prediction.
- Solid mechanics: $\vf$ to correct stress-strain relation, so as to improve the structural deformation prediction.
- System dynamics: $\vf$ to be used as an unknown external forcing term, so as to improve the accuracy of simulation.
- When $\cM$ is incorporated into the analysis framework, the governing equation becomes, $$ \cR(\vu;\vf)=0,\quad \mbox{where } \vf=\cM(\vu;\vd) $$ and similarly, the model error becomes $\cJ(\vu;\vf)$.
Optimization formulation¶
To improve the model, one wants to find the output of the calibration model that minimizes the model error, i.e. $$ \begin{align} \min_{\vf} &\quad \cJ(\vu;\vf) \\ \mathrm{s.t.} &\quad \cR(\vu;\vf) = 0 \end{align} $$
Two strategies to solve the optimization problem,
- Indirect approach:
- First, solve the optimization problem and find the optimal correction factors $\vf$.
- Then, using $\vf$ as training data, fit a calibration model $\vf=\cM(\vu;\vd)$.
- Pros: $\cM$ does not explicitly exist in the governing equation, so easy to implement
- Cons: Size of $\vf$ can be large, so inefficient to train; and accuracy may be sacrificed in model fitting.
- Direct approach:
- Implement the model $\cM$ in $\cR$ and $\cJ$ directly
- Solve a coupled optimization problem that generates the optimal parameters $\vd$ in the calibration model.
The direct approach is solving a slightly different optimization problem, $$ \begin{align} \min_{\vd} &\quad \cJ(\vu;\vd) \\ \mathrm{s.t.} &\quad \cR(\vu;\vd) = 0 \end{align} $$ where $\cJ$ is used the loss function to train the calibration model; the difficulty is the backpropagation through the equality constraint.
Adjoint Method for PDE Constraint¶
Consider the optimization problem in general, $$ \begin{align} \min_{\vtt} &\quad \cJ(\vu;\vtt) \\ \mathrm{s.t.} &\quad \cR(\vu;\vtt) = 0 \end{align} $$ where $\cR(\vu;\vtt) = 0$ is a set of $N$ equations representing the numerical discretization of a PDE. The size of $\vu$ can be way larger than the size of the design variables $\vtt$.
Given the design variables $\vtt^*$, the PDE is usually solved by a certain form of the Newton-Raphson method, $$ \begin{align} \ppf{\cR}{\vu}\Delta\vu^i &= -\cR(\vu^i,\vtt^*) \\ \vu^{i+1} &= \vu^i + \Delta\vu^i \end{align} $$ where the first equation is typically solved using an iterative method.
Formulation by adjoint variables¶
For optimization, one wants the full derivative of $\cJ(\vu;\vtt)$ w.r.t. $\vtt$, i.e. $$ \ddf{\cJ(\vu;\vtt)}{\vtt} = \ppf{\cJ}{\vu}\ppf{\vu}{\vtt} + \ppf{\cJ}{\vtt} $$ where $\ppf{\vu}{\vtt}$ is non-trivial to compute.
From the constraint, one knows, $$ \ddf{\cR(\vu;\vtt)}{\vtt} = \ppf{\cR}{\vu}\ppf{\vu}{\vtt} + \ppf{\cR}{\vtt} = 0 $$ or $$ \ppf{\vu}{\vtt} = \left(-\ppf{\cR}{\vu}\right)^{-1}\ppf{\cR}{\vtt} $$
Therefore, $$ \ddf{\cJ(\vu;\vtt)}{\vtt} = \ppf{\cJ}{\vu}\left(-\ppf{\cR}{\vu}\right)^{-1}\ppf{\cR}{\vtt} + \ppf{\cJ}{\vtt} $$
Now let $$ \vtf^T = -\ppf{\cJ}{\vu}\left(\ppf{\cR}{\vu}\right)^{-1} $$ or $$ \left(\ppf{\cR}{\vu}\right)^T\vtf = -\left(\ppf{\cJ}{\vu}\right)^T $$
This last equation is called the Adjoint Equation, and $\vtf$ is called the Adjoint Variable.
As a result, the full derivate of $\cJ(\vu;\vtt)$ w.r.t. $\vtt$ is computed as follows,
- Given $\vtt$, solve $\cR(\vu;\vtt)=0$ to find $\vu$
- In this process one obtains $\ppf{\cR}{\vu}$.
- Given $\vtt$ and $\vu$, find $\ppf{\cJ}{\vu}$, $\ppf{\cJ}{\vtt}$, and $\ppf{\cR}{\vtt}$.
- Solve the adjoint equation and find $\vtf$. $$ \left(\ppf{\cR}{\vu}\right)^T\vtf = -\left(\ppf{\cJ}{\vu}\right)^T $$
- The gradient of $\cJ$ $$ \ddf{\cJ(\vu;\vtt)}{\vtt} = \vtf^T\ppf{\cR}{\vtt} + \ppf{\cJ}{\vtt} $$
Formulation by Lagrange multipliers¶
Introduce a vector of Lagrange multipliers $\vtf$ $$ \cL(\vu;\vtt) = \cJ(\vu;\vtt) + \vtf^T \cR(\vu;\vtt) $$
Now one wants the full derivative of $\cL(\vu;\vtt)$ w.r.t. $\vtt$, i.e. $$ \ddf{\cL(\vu;\vtt)}{\vtt} = \ppf{\cJ}{\vu}\ppf{\vu}{\vtt} + \ppf{\cJ}{\vtt} + \vtf^T\left( \ppf{\cR}{\vu}\ppf{\vu}{\vtt} + \ppf{\cR}{\vtt} \right) $$
The RHS is $$ \ppf{\cJ}{\vtt} + \vtf^T\ppf{\cR}{\vtt} + \left(\ppf{\cJ}{\vu} + \vtf^T\ppf{\cR}{\vu}\right)\ppf{\vu}{\vtt} $$
One can eliminate $\ppf{\vu}{\vtt}$ by setting the bracket to zero, $$ \ppf{\cJ}{\vu} + \vtf^T\ppf{\cR}{\vu} = 0 $$ or the adjoint equation $$ \left(\ppf{\cR}{\vu}\right)^T\vtf = -\left(\ppf{\cJ}{\vu}\right)^T $$
Extra: Multiple PDE constraints¶
When a multi-physics problem is considered, which is not uncommon in the field of engineering, the optimization problem becomes $$ \begin{align} \min_{\vtt} &\quad \cJ(\vU;\vtt) \\ \mathrm{s.t.} &\quad \cR_j(\vU;\vtt) = 0,\quad j=1,\cdots,m \end{align} $$ where $m$ PDE's are involved, with unknowns $\vU=\{\vu_1,\cdots,\vu_m\}$.
Introduce a set of Lagrange multipliers, or the adjoint variables, $$ \cL(\vU;\vtt) = \cJ(\vU;\vtt) + \sum_{j=1}^m \vtf_j^T \cR_j(\vU;\vtt) $$
Take the full derivative, $$ \begin{align} \ddf{\cL(\vu;\vtt)}{\vtt} &= \ppf{\cJ}{\vU}\ppf{\vU}{\vtt} + \ppf{\cJ}{\vtt} + \sum_{j=1}^m \vtf_j^T\left( \ppf{\cR_j}{\vU}\ppf{\vU}{\vtt} + \ppf{\cR_j}{\vtt} \right) \\ &= \ppf{\cJ}{\vtt} + \sum_{j=1}^m \vtf_j^T\ppf{\cR_j}{\vtt} + \sum_{j=1}^m \left(\vtf_j^T\ppf{\cR_j}{\vU} + \ppf{\cJ}{\vU}\right)\ppf{\vU}{\vtt} \end{align} $$
A set of $m$ coupled adjoint equations is identified as $$ \sum_{j=1}^m \left(\ppf{\cR_j}{\vu_i}\right)^T\vtf_j = \left(\ppf{\cJ}{\vu_i}\right)^T,\quad i=1,\cdots,m $$
Back to Model Calibration¶
- The adjoint method can be readily applied to the indirect approach by letting $\vtt=\vf$.
- Slightly more involved for the direct approach, where $\vtt=\vd$:
$$
\ppf{\cR}{\vtt} = \ppf{\cR}{\vf}\ppf{\vf}{\vd}
$$
- $\ppf{\cR}{\vf}$: Same term in indirect approach.
- $\ppf{\vf}{\vd}$: A new term found by backpropagation of $\cM$
Numerical Example¶
We solve a 1D advection-diffusion equation for $x\in [0,1]$ $$ p u' - u'' = f(x;\vtt),\quad u(0)=u_0,\ u'(1)=n_1 $$ where $p$ is a constant, representing wave speed.
The RHS contains some unknown parameters $$ f(x;\vtt) = x^2 + \theta_1 x + \theta_2 $$
Suppose we know a solution $u^*$ found at the true parameters $\theta^*$. To infer $\theta^*$ from $u^*$, we solve $$ \begin{align*} \min_{\vtt} &\quad J(u;\vtt) \equiv \int_0^1 (u-u^*)^2 dx \\ \mathrm{s.t.} &\quad p u' - u'' = f(x;\vtt),\quad u(0)=u_0,\ u'(1)=n_1 \end{align*} $$
xx = np.linspace(0,1,41)
f = plt.figure(figsize=(6,4))
plt.plot(xx, fu(xx));

System Discretization¶
We use a generic Galerkin method to discretize the differential equation and the objective.
Specifically, we pick $N$ Legendre polynomials as basis functions, and represent the solution as $$ u(x) = \sum_{i=1}^N u_i\psi_i(x) \equiv \vty^T(x) \vu $$
f, ax = plt.subplots(ncols=2, figsize=(8,4))
for _i in range(0,5):
ax[0].plot(xx, eval_leg0(_i, xx), label=f"Order={_i}")
ax[1].plot(xx, eval_leg1(_i, xx))
ax[0].legend()
ax[0].set_title("Legendre polynomials")
ax[1].set_title("Derivatives");

The objective is converted to a quadratic form, $$ \cJ(\vu;\vtt) = \int_0^1 \left( \vty^T\vu - u^* \right)^2 dx \equiv \vu^T \vM \vu - 2\vu^T \vm + \text{const} $$ where $$ \vM = \int_0^1 \vty\vty^T dx,\quad \vm = \int_0^1 \vty u^* dx $$
The equation is converted to a linear system,
$$
\cR(\vu;\vtt) = \vA\vu - \vb(\vtt) = 0
$$
where for the formulation of $\vA$ see the Differential Equations slides in Math review, and
$$
\vb(\vtt) = \int_0^1 \vty f(x,\vtt) dx
$$
Adjoint-based Optimization¶
This brings us to the standard form: $$ \begin{align*} \min_{\vtt} &\quad \cJ(\vu;\vtt) \\ \mathrm{s.t.} &\quad \cR(\vu;\vtt) = 0 \end{align*} $$ Now suppose we start with an initial guess, say $\vtt^{(0)}=[10.0, 10.0]$.
Then, to use the adjoint formulation to obtain the gradients for optimization $\ddf{\cL(\vu;\vtt)}{\vtt}$ at $\vtt^{(0)}$ -
First, we solve $\vu^{(0)}$ at $\vtt^{(0)}$. Clearly this is totally off.
theta0 = [10.0, 10.0]
sol, mats = galerkin(M, N, p, ub, nb, theta0)
print(obj(sol)[0])
compare_sol(sol, fu, 41);
0.6717431265076287

Then, we solve the adjoint problem $$ \left(\ppf{\cR}{\vu}\right)^T\vtf = -\left(\ppf{\cJ}{\vu}\right)^T $$ where $\ppf{\cR}{\vu}=\vA$, $\ppf{\cJ}{\vu}=(2\vM\vu-2\vm)^T$
And evaluate the gradients $$ \ddf{\cL(\vu;\vtt)}{\vtt} = \ppf{\cJ}{\vtt} + \vtf^T \ppf{\cR}{\vtt} $$ where $\ppf{\cJ}{\vtt}=0$ and $\ppf{\cR}{\vtt}=-\ppf{\vb}{\vtt}$
Adjoint-based gradients, verified by finite difference:
# Adjoint
sol, mats = galerkin(M, N, p, ub, nb, theta0) # Forward solve
_, gda = galerkin_da(sol, mats, obj) # Adjoint/Backward solve
# Finite difference, using a SciPy function
def Jfd(qs):
sol, _ = galerkin(M, N, p, ub, nb, qs)
d, _ = obj(sol)
return d
gfd = approx_fprime(theta0, Jfd)
print(f"Adjoint: {gda}, FD: {gfd}")
Adjoint: [0.04238442 0.09196361], FD: [0.04238444 0.09196366]
Now let's use a vanilla optimizer from SciPy to solve the problem (i.e., train the model)
def Jda(qs):
sol, mats = galerkin(M, N, p, ub, nb, qs)
fun, grd = galerkin_da(sol, mats, obj)
return fun, grd
res = minimize(Jda, theta0, method="l-bfgs-b", jac=True)
print(res)
fun: 7.840073109167548e-09
hess_inv: <2x2 LbfgsInvHessProduct with dtype=float64>
jac: array([-2.01714204e-08, -4.43224716e-08])
message: 'CONVERGENCE: NORM_OF_PROJECTED_GRADIENT_<=_PGTOL'
nfev: 8
nit: 4
njev: 8
status: 0
success: True
x: array([ 0.00034045, -0.00022833])
# Check the converged solutions, i.e., "learned" model
sol, mats = galerkin(M, N, p, ub, nb, res.x)
compare_sol(sol, fu, 41);

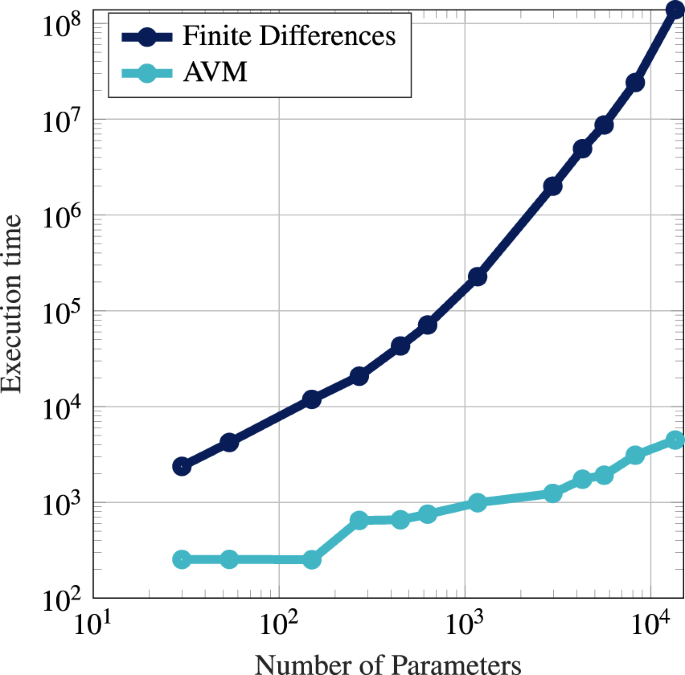
# Note that much more cost would be incurred if we optimize
# by BRUTAL force (i.e., finite difference)
res = minimize(Jfd, theta0, method="l-bfgs-b", jac=False)
print(res) # Look at `nfev`: function evaluation
fun: 7.840448019872488e-09
hess_inv: <2x2 LbfgsInvHessProduct with dtype=float64>
jac: array([-3.35777998e-08, -7.81670232e-08])
message: 'CONVERGENCE: NORM_OF_PROJECTED_GRADIENT_<=_PGTOL'
nfev: 24
nit: 4
njev: 8
status: 0
success: True
x: array([ 0.00038461, -0.00025382])
Key take-away: Adjoint formulation enables machine learning with large scale simulations.
 (Figure from Neustock et al. Nature 2019)
(Figure from Neustock et al. Nature 2019)