Published: Jun 19, 2023 by Daning Huang
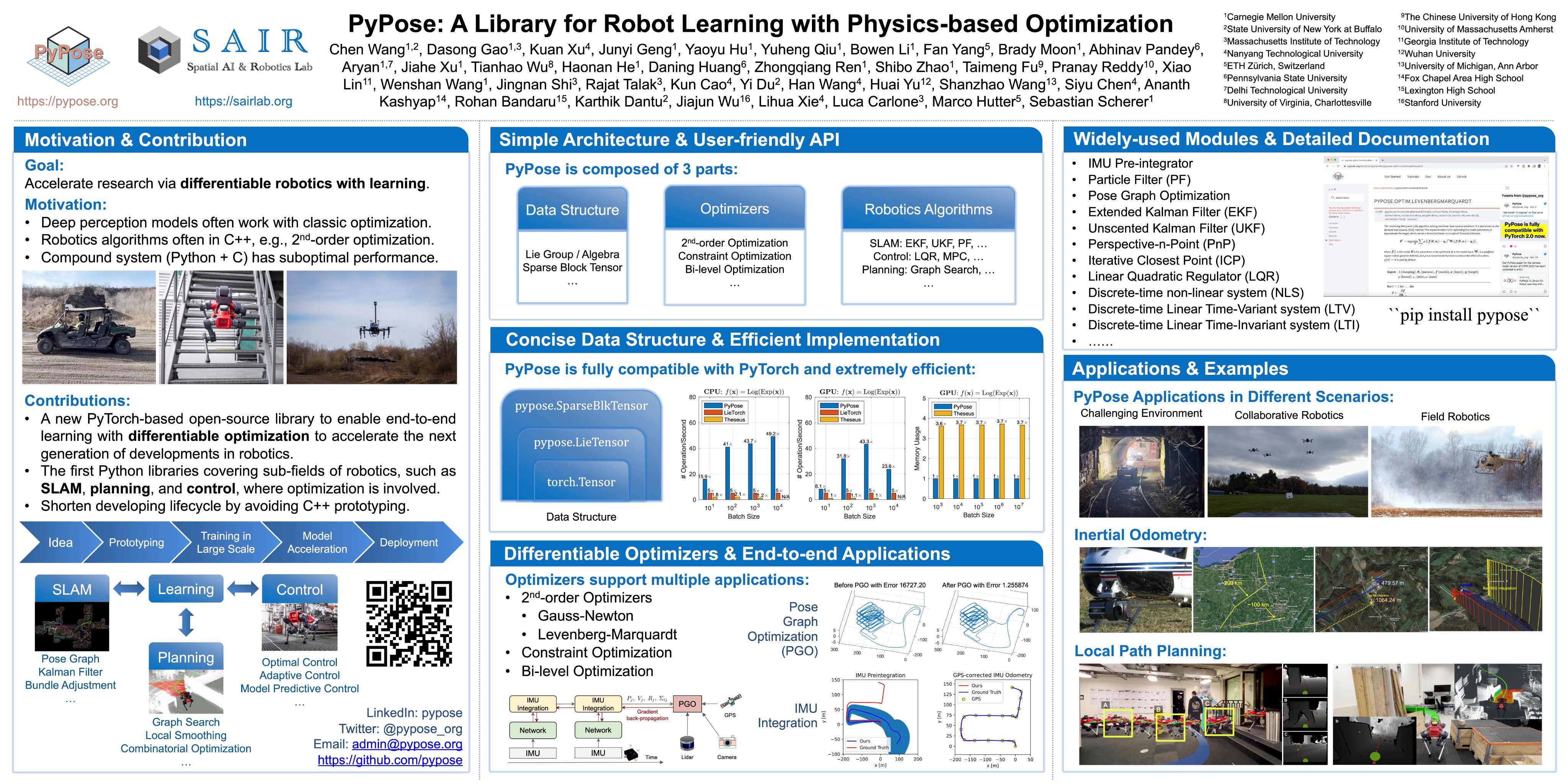
A paper PyPose: A Library for Robot Learning With Physics-Based Optimization has been presented in the past CVPR 2023 conference. This is an effort made by a large team of developers, led by Dr. Chen Wang from SUNY Buffalo, with people from CMU, MIT, NTU, ETHZ, etc., and of course we Penn State, with our colleague Dr. Junyi Geng.
In a nutshell, PyPose enables the full-stack, end-to-end differentiable learning for robotic applications. One key challenge in robotic learning is the effective representation of poses, i.e., orientations and positions of robots, that requires the usage of Lie group; PyPose is a unique library that bakes Lie group into PyTorch in the robotic context. In this effort, in collaboration with Dr. Geng, we contributed functionalities and applications on the control and system side.
For more information, see its official website.