The Grand Challenge
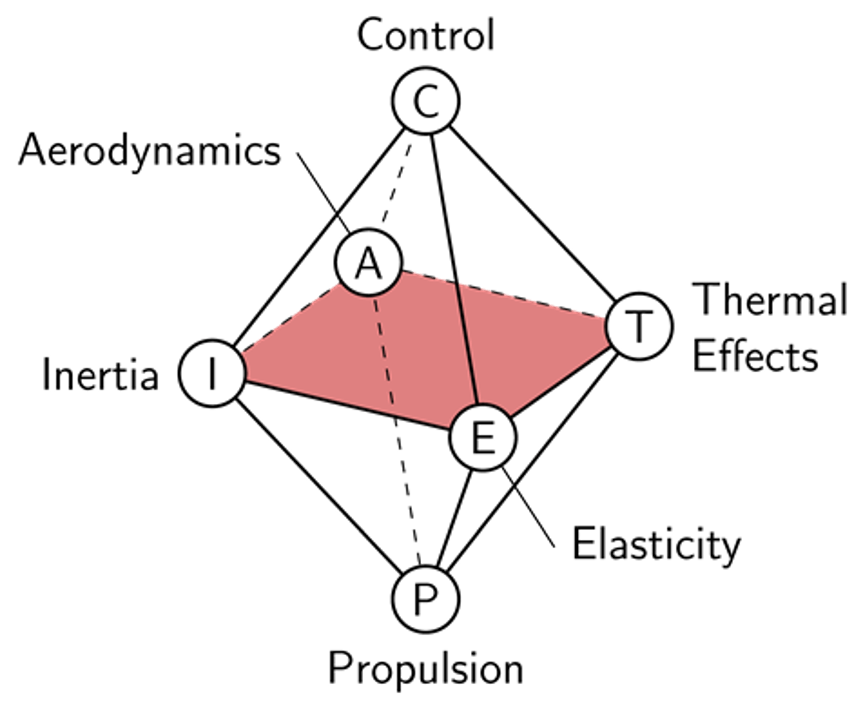
Our research is motivated by the desire to expand the last frontier of aerospace engineering, represented by hypersonic vehicles and high-speed VTOL aircraft. The development of these advanced aerospace systems has been constrained by their inherent complex multi-physics nature and the strong coupling among their subsystems, including but not limited to
- Aerodynamics/fluid dynamics, Thermodynamics, …
- Structural dynamics, Material response, …
- Flight dynamics and control, Guidance and navigation, …
- Propulsion system, …
- etc…
While there are relatively mature solutions for each single disciplinary/subsystem involved in multi-physics problems, these problems cannot be completely understood and solved without integrating the Multi-Disciplinary tools for Analyzing, Optimizing, and Controlling (MDAOC) of future unconventional aircraft. For example,
- How does fluid-thermal-structural interaction (FTSI) impact the autonomous flight of hypersonic vehicles? Conversely, for better autonomy how to design the vehicle for desired FTSI response?
- How does the unsteady aerodynamics and environmental turbulence impact the maneuverability and agility of quad-rotor drones? Conversely, how does that inform the drone design?
- Basically, is it possible to perform a full-stack optimization of an engineering system, that bridges the “inner optimization” of its subsystems (e.g., aero-structural opt. of wings) and the “outer optimization” of the control and autonomy (e.g., trajectory opt. and controller design)? This should release the full potential of an engineering system.
Impossible Trinity of Modeling
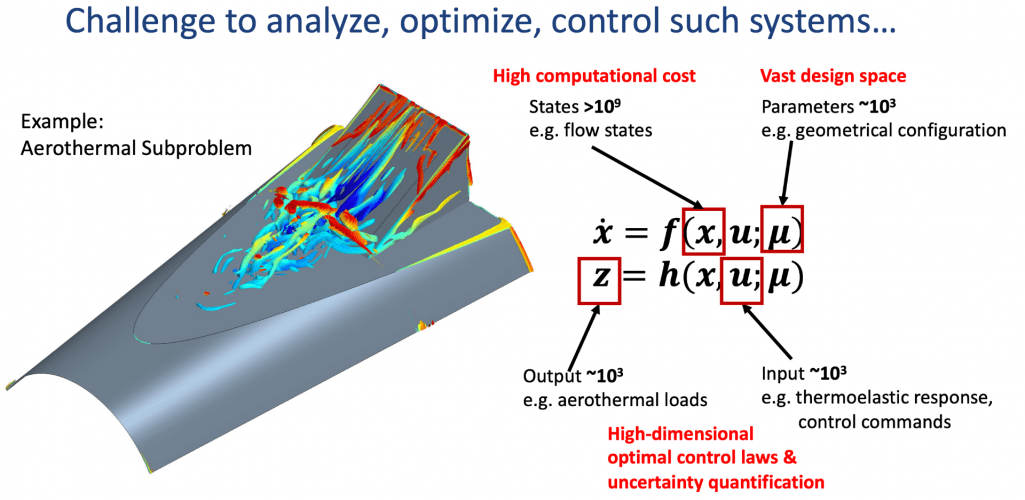
The crux of integrated MDAOC is the modeling of complex multi-physics dynamics. And this is a “holy grail” problem: Is it possible to find one mathematical model that is
- Accurate to reproduce the dynamics, that
- Works over the entire range of operating conditions
- Captures nonlinearities such as bifurcations and limit cycles
- Computationally efficient to evaluate, that
- Supports automatic differentiation for large-scale optimization
- Suits for deployment on hardware and real-time computing
- Supports infinite-dimensional parameters, e.g.,
- Geometrical shapes and material properties, as distributed parameters, for optimization
- Control inputs and system states, as time-varying parameters, for autonomy
Usually, it is impossible to have all three bullets at the same time, just like the impossible trinity.
However, this is what the APUS Lab aims to tackle.
Our Methodology
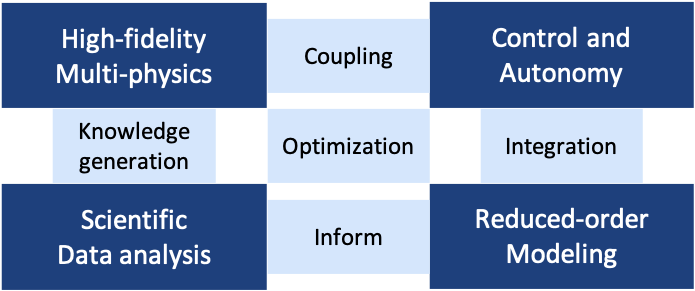
In APUS Lab, we use a closed-loop and integrated set of methods to tackle the Grand Challenge:
High-Fidelity Multi-Physics
We use simulation, with experimental validation, to resolve unknown physics.
- High-Speed Fluid-Thermal-Structural Interaction on Complex Geometry
- Fluid-Thermal-Structural Interaction With High-Temperature Effects
- Computational Framework for Hypersonic Aerothermoelasticity
Scientific Data Analysis
We extract out physical knowledge from the sheer volume of multi-physics simulation data.
- Operator-Theoretic Analysis for Spatiotemporal Dynamics
- Design of Aeroelastically Scaled Model in a Compressed Air Wind Tunnel Facility
- Refined Hypersonic Aerothermoelastic Scaling Laws
Reduced-Order Modeling
We develop ROMs for efficient, accurate, and robust prediction of system dynamics with the new knowledge
- Physics-Infused Reduced-Order Modeling
- Geometric Deep Learning for Dynamics on Graphs
- Fluid-Thermal-Structural Interaction Using Multi-Fidelity Multi-Variate Surrogate
- Reduced-Order Modeling of Hypersonic Aerothermodynamics
Control and Autonomy
We integrate ROMs and control & autonomy to achieve the full-stack design optimization of an engineering system.
- NSF CAREER Award (media coverage)
- Rapid Aeroservoelastic Design of Morphing Unmanned Aerial Vehicles (media coverage)
- Enhanced Control for eVTOL Vehicles Using Higher-Fidelity Aerodynamic Model
- Control Co-Design of Hypersonic Vehicles
- High Speed Composite Rotor Optimization